Роботы готовятся к разведке и бою
Сергей Бобровский
В Центре морских и космических систем ВМС США (Space and Naval Warfare Systems Command, SPAWAR; http://www.spawar.navy.mil/sandiego/), расположенном в Сан-Диего, есть отдел, занимающийся созданием робототехнических устройств для военного применения. Сотрудники центра собрали большое количество фактической информации об истории предмета (начиная с 60-х годов), создав силами энтузиастов оригинальный виртуальный музей. В данной статье приведен обзор основных технологических направлений и достижений, связанных с использованием роботов в военных целях, подготовленный на основе доступных в SPAWAR материалов.
На земле
RSTA - система сбора разведывательной информации (Reconnaissance, Surveillance, and Target Acquisition). 1982-1985
RSTA создавалась для отработки человеко-машинного взаимодействия при эксплуатации групп телеуправляемых систем. Также исследовались особенности движения автономных устройств по различным типам поверхности и возможность дистанционного управления установленным на машинах оружием. Оператор управлял объектами RSTA с помощью систем стереоскопического зрения и звука. Положение объектов отображалось на экране компьютера в изометрической проекции.
GSR - наземный разведывательный робот (Ground Surveillance Robot). 1982-1986

Дистанционно управляемое устройство создавалось на базе военной семитонной машины M-114 для отработки концепции гибкой модульной робототехнической архитектуры. После успешной демонстрации работы были прекращены - в связи с временным снижением финансирования МО США в середине 80-х годов.
Greenman - робот-манипулятор. 1983-1988
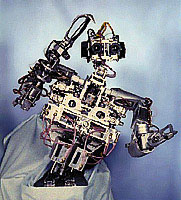
Робот, имеющий руки, тело и голову, предназначался для отладки технологий дистанционного управления манипуляторами в сложных условиях. В ходе экспериментов с этой довольно простой системой стало понятно, что для эффективного использования подобных устройств необходимо обеспечить высокое число степеней свободы для кибернетических рук, хорошее разрешение видеокамеры и организовать с оператором обратную связь по прилагаемым усилиям (рука человека - манипулятор).
TOV - телеуправляемая машина (TeleOperated Vehicle). 1985-1989

TOV готовилась для применения в реальных тактических операциях. Она управлялась с помощью кабеля длинной 30 км. Стереоизображение от двух установленных на TOV камер передавалось на экран, вмонтированный в шлем оператора.
TOV оборудована инфракрасным датчиком и лазерным дальномером, что позволило использовать ее совместно с устройствами наведения ракет Hellfire и артиллерийских установок Copperhead (для передачи информации о местонахождении целей).
Для обеспечения самозащиты TOV снабжена дистанционно управляемым пулеметом калибра 0.50.
STV - обновленная телеуправляемая машина (Surrogate Teleoperated Vehicle). 1990-1993

Для поддержки наземных операций (разведки, сбора информации, поиска объектов противника) Пентагон выпустил 14 таких машин - улучшенных версий TOV. STV, созданная на базе шестиколесной машины Big Boss, развивает скорость 50 км/ч. Она снабжена стерео- и инфракрасной камерами, устройством ночного видения, лазерным дальномером, FM-передатчиком и радиомодемом на 9600 бод. Диапазон действия STV - в радиусе 2 км от управляющего центра.
MSSMP - многоцелевая платформа для разведывательных миссий (Multipurpose Security and Surveillance Mission Platform). 1992-1998

Платформа MSSMP предназначена для быстрого развертывания автономных средств сбора информации. Она характеризуется высокой мобильностью и возможностью одновременного дистанционного управления несколькими объектами по каналам военной тактической радиосвязи.
MSSMP представляет собой набор датчиков, которые могут размещаться на наземных автономных устройствах или беспилотных самолетах, и состоит из видео- и инфракрасной камер, лазерного дальномера и различных датчиков движения, служащих для обнаружения целей.
Основные работы по первичному анализу собираемых данных происходят в самой MSSMP, что позволяет минимизировать радиоактивность, передавая только наиболее важные сведения - прежде всего картинки пойманного датчиками объекта и сведения о расстоянии до него. Оператор MSSMP получает информацию на ноутбук по каналам радиосети Ethernet TCP/IP.
В 1997 г. демонстрировались возможности MSSMP, установленной на миниатюрном летающем устройстве, разведывавшем обстановку внутри комнат городского здания. В этом же году проект был переведен в MPNSS.
MPNSS - система носимых сетевых датчиков (Man-Portable Networked Sensor System). 1987 - по настоящее время
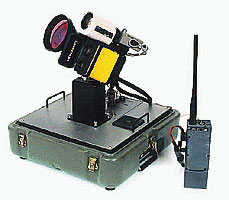
Система представляет собой набор сетевых устройств, объединенных по IP-протоколу в радиосети и доступных для переноски одним солдатом; подходят они и для использования на военной технике и автономных роботах.
MPNSS подразумевает единый способ обмена цифровыми данными, видео- и аудиоинформацией по сетям военной радиосвязи, телефонным линиям, Ethernet, сотовым и другим каналам в широковещательном или "точка - точка" режимах. В стандартный набор входят видео- и инфракрасная камеры, лазерный дальномер, акустический датчик, GPS-приемник и компьютер для обработки данных (ПО функционирует под управлением Microsoft Windows).
MDARS - система оперативного обнаружения и реагирования (Mobile Detection Assessment and Response System). 1989 - по настоящее время

Объединенный проект сухопутных и морских сил США направлен на обеспечение автоматического обнаружения незаконных проникновений на военные склады и контроля за целостностью хранимых там объектов (путем сканирования инфракрасным датчиком цифровых меток, нанесенных на оборудование).
MDARS - это набор автономных патрулирующих устройств, в случайном режиме перемещающихся по территории складов. Помимо контроля за наличием предметов на складах они также способны обнаруживать места возгорания или затопления и фиксировать появление незваных гостей.
С конца 90-х технологии MDARS, доказавшие свою достаточно высокую эффективность, решено было обобщить для задачи контроля за целостностью наружных объектов - таких, как линии связи, дороги, здания и т. п. С этой целью автономные устройства были дополнительно снабжены ультразвуковым сонаром, радаром, работающим в миллиметровом диапазоне, стереокамерой и GPS-приемником. Роботы научились самостоятельно разрешать коллизии (например, объезжать неожиданно возникшие препятствия или выбираться из тупиков), что позволило использовать MDARS в комплексных системах обеспечения безопасности военных инфраструктур.
К преимуществам MDARS относятся относительная простота архитектуры - объекты перемещаются в пределах готовой карты оцифрованной местности, что упрощает навигацию, а цели патрулирования достигаются с помощью наборов недорогих датчиков, позволяющих дополнительно решать большое числовспомогательных задач (обнаружение пожаров, поиск нужного предмета на складе и т. п.). В то же время, как показала практика, для контроля за большими складами нужны десятки роботов, а стало быть, возникает необходимость в координации их деятельности, что требует значительных вычислительных ресурсов. MDARS-система может неадекватно реагировать на частое появление внешних динамических объектов (например, патрульных солдат или машин), имеются сложности в корректном распознавании реальных и мнимых угроз и проблемы в сборе информации о нарушителях без привлечения человека-оператора. Совершенствование MDARS продолжается именно в этих направлениях.
MRA - модульная робототехническая архитектура (Modular Robotic Architecture). 1990 - по настоящее время
MRA представляет собой стандартизованный набор программных и аппаратных модулей и ультразвуковых, инфракрасных и микроволновых датчиков, предназначенных для быстрой сборки прототипов робототехнических устройств с возможностью подключения к готовой системе элементов, реализующих передовые ИТ. В качестве примера устройства, в котором используется данный набор, можно назвать ModBot, собранный из модулей отслеживания собственного перемещения, выработки действий при обнаружении внешнего объекта и его приближении к роботу, планирования движения и др. Связь с ModBot осуществляется как по кабелю, так и по инфракрасному каналу. На базе этого устройства были созданы роботы серии ROBART.
MRA также применялась для отладки нейросетевых технологий управления автономными роботами.
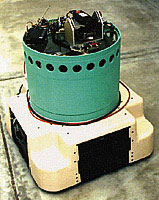
Серия ROBART. 1980 - по настоящее время

1980-1982. Один из первых автономных роботов ROBART создавался для патрулирования и осмотра помещений, нахождения мусора, обнаружения участков возгорания или затопления. ROBART был снабжен синтезатором речи, оптическими и ультразвуковыми датчиками движения, вибрации, дыма, огня, газа и воды и обладал способностью самостоятельно оценивать серьезность нарушения и решать, надо ли подавать сигнал тревоги.
Робот автономно действовал в течение шести часов, а затем самостоятельно подключался к сети для подзарядки. Для определения собственного положения, планирования движения и объезда препятствий он использовал инфракрасный датчик.
1982-1992. Вторая версия ROBART II была реализована в мультипроцессорной архитектуре, что значительно повысило качество обработки информации от датчиков и степень автономного поведения. К модели добавились новые датчики температуры, давления, света, шума, микроволновые сенсоры и видеокамера. Робот был связан по инфракрасному каналу с управляющим модулем (программа, выполнявшаяся на IBM-PC/AT).
ROBART II предназначался для контроля за незаконным проникновением посторонних на военные склады и сохранностью хранимой на этих складах продукции. В 1989 г. робот был снабжен средствами дистанционного управления для решения более сложных задач сбора информации.
1992 - по настоящее время. Современный ROBART III постепенно становится полноценным боевым роботом. Пока он оборудован несмертоносным оружием (пневматическое ружье, стреляющее шрапнелью и стрелами со скоростью шесть выстрелов за 1,5 с) и лазерным прицелом.
В ходе эксплуатации предыдущей модели были выявлены сложности в дистанционном управлении, касающиеся прежде всего человеко-машинного интерфейса, который был значительно упрощен, а ROBART III получил больше самостоятельности. Теперь он способен своими силами строить модель мира и не заблудится в сложных лабиринтах помещений, а его создатели автоматизировали процесс наведения оружия на цель и ведут работы по организации совместных действий групп подобных сторожевых роботов.
MPRS/URBOT - носимая робототехническая система (Man Portable Robotic System). 1999 - по настоящее время
Архитектура MPRS рассчитана на оперативное внедрение в робототехнику новых ИТ-технологий, в том числе коммерческих. Она основывается на телеуправляемом интерфейсе ROBART III, дополненном ультразвуковыми и инфракрасными датчиками обнаружения препятствий. Первый гусеничный прототип MPRS был выпущен в 1999 г. и применялся для обследования узких подземных туннелей. В нем использовались два бортовых процессора - один управлял движением, а второй обрабатывал сигналы датчиков. Оператор получал аудио- и видеоданные в масштабе реального времени (15-20 кадров в секунду), а синтезатор речи сообщал о возможных неполадках.
С помощью MPRS военные планируют быстро собирать легкие мобильные роботы для использования в городских условиях.
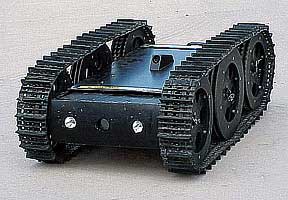
Дистанционно управляемые миниатюрные устройства. 2000 - по настоящее время

Группы дистанционно управляемых миниатюрных гусеничных машинок (каждая из них занимает объем в 1 куб. см.) смогут проникать внутрь зданий по вентиляционным шахтам и трубопроводам. Они станут выявлять взрывные устройства, заложенные в местах, труднодоступных для человека, а также вести разведку территории.
Каждый такой "танк" снабжен датчиком температуры и процессором с ПЗУ 8 Кб и передвигается со скоростью 50 см/мин. В ближайшие планы разработчиков из Сандийской национальной лаборатории (http://www.sandia.gov) входит оборудование этих машинок видеокамерой, микрофоном и устройством связи.
В небесах
AROD - авиационное удаленно управляемое устройство (Airborne Remotely Operated Device). 1980

В рамках проекта AROD создавались беспилотные устройства вертикального взлета и посадки, способные стартовать из пусковых шахт (как ракеты) и выполнять работы по сбору информации.
Первое поколение подобных устройств использовало электрическую энергию и получало питание по кабелю с наземной станции. Второе поколение было оборудовано бензиновым мотором мощностью 26 л. с. и обменивалось информацией с оператором по оптоволоконному кабелю длиной 5 км.
Главной проблемой AROD оказалась низкая устойчивость в полете, поэтому разработчики отказались от данной концепции и перешли к работам над наземным устройством TOV (см. первую часть статьи).
AMGSSS - система мобильной воздушной разведки (Air Mobile Ground Security and Surveillance System). 1992
В концепцию AMGSSS закладывались принципы быстро развертываемых дистанционно управляемых воздушных аппаратов для сбора информации. Как и в случае с AROD, идеи данного проекта оказались более подходящими для наземных миссий, и AMGSSS был переведен в описанный в первой части статьи проект MSSMP.
В настоящее время сфера беспилотных самолетов наиболее развита и коммерциализирована, так как возможности сбора данных с помощью воздушных устройств значительно превосходят аналогичные возможности наземных или подводных роботов (которые тоже полезны для решения достаточно специализированных задач). Хорошо известен успешно применяемый Пентагоном в реальных боевых операциях беспилотный самолет-разведчик Predator, а также российский "Шмель" и т. п.
И на море
EAVE - экспериментальное автономное устройство (Experimental Autonomous Vehicle). 1960
Пентагон интересовался дешевыми телеуправляемыми подводными устройствами еще с начала 60-х годов - прежде всего для обследования подводных трубопроводов. Уже в то время первая модель EAVE была способна самостоятельно планировать маршрут движения, осуществлять визуальную навигацию по линии трубы и использовала нейронную систему контроля местоположения и маневрирования.
Скоростная версия первой модели, названная Free Swimmer II, была дополнена планировщиком миссий, акустической навигационной системой и оптоволоконным кабелем для связи с оператором. Она самостоятельно возвращалась обратно и находила место пристыковки.
SCAT - погружаемый кабельный аппарат (Submersible Cable-Actuated Teleoperator). 1970
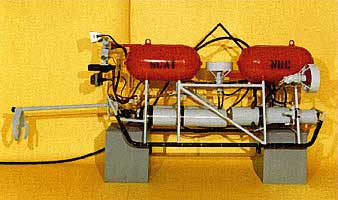
Первые версии этого аппарата снабжались камерой, формировавшей стереоскопическое изображение, а также датчиком глубины и прожектором. Вариант Snoopy, например, управлялся с помощью кабеля длиной 500 м.
Одна из модификаций SCAT под названием Mine Neutralization Vehicle (минный нейтрализатор) была дополнительно снабжена камерой и сонаром для поиска мин и обменивалась с кораблем по кабелю информацией о возможном местонахождении мин.
В дальнейшем идеи SCAT воплотились в проектах ATV и CURV.
CURV - подводный восстановительный аппарат (Cable-controlled Undersea Recovery Vehicle). 1970-1980

Первый прототип CURV появился в начале 60-х годов. Он представлял собой дистанционно управляемое подводное устройство с телекамерой и использовался для поиска и обследования утонувших бомб и снарядов на глубинах до 1000 м.
В 1973 г. с помощью модели CURV III удалось обнаружить и спасти двух человек - экипаж подводной лодки Pisces III, затонувшей недалеко от берегов Ирландии.
Небольшие устройства данной серии (длиной порядка одного метра) послужили основой для автономной подводной системы RUWS (Remote Unmanned Work System), позволившей создать аппараты, действующие на глубинах до 6 км (этого достаточно для достижения дна на 98% площади всех морей и океанов). Рука-манипулятор RUWS с семью степенями свободы могла учитывать силу сжатия рычага управления человеком-оператором.
Разработки CURV послужили основой также для ATV, а CURV III используется и по сей день, в основном совместно с AUSS (см. ниже).
TOPS/CVM - телеуправляемая система (Teleoperator/Teleoresence System/Concept Verification Model). 1988-1991

Дистанционно управляемые подводные устройства TOPS применяются в опасных для человека условиях - на больших глубинах, в условиях экстремальной температуры, в сильно загрязненной воде. Оператор управляет аппаратом с помощью голосового интерфейса. Манипуляторы TOPS имеют до девяти степеней свободы.
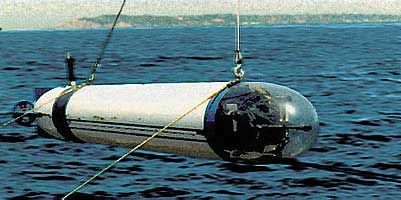
AUSS - беспилотная поисковая система (Advanced Unmanned Search System). 1990-е гг.

На создание AUSS военные потратили 12 лет. Эта машина предназначена для поиска различных объектов в глубинах океанов. Она не использует кабель, но имеет средства дистанционного управления и обмена информацией в масштабе времени, близком к реальному. Бортовая система акустической связи передает сжатые данные со скоростью 4800 бит/с и принимает команды со скоростью 1200 бит/с.
Все основные маневры AUSS выполняет самостоятельно - ей достаточно указать направление движения и цель поиска, а как это сделать, AUSS решает сама.
Для поиска AUSS использует два сонара, а камера позволяет человеку окончательно идентифицировать объект. Бортовая навигация осуществляется с помощью доплеровского сонара и гирокомпаса, а уточнение абсолютного положения проводится по данным, поступающим с GPS-приемника, установленного на связанном с AUSS корабле.
В длину AUSS достигает 6 м, она способна непрерывно работать 10 ч и требует 20 ч на подзарядку аккумуляторов. Спуск на глубину 7000 м и обратный подъем занимает один час.
Выявление ложной цели путем обработки собранных данных на установленном на корабле или берегу компьютере занимает от 10 до 15 мин, а точная идентификация искомого объекта может занимать часы (для этого, в частности, AUSS передает наверх сотни изображений).
В 1992 г. AUSS нашла обломки военной техники времен Второй мировой войны на глубине около 1000 м и обнаружила тестовый объект на глубине 4000 м.
DSSN - распределенная разведывательная сеть (Distributed Surveillance Sensor Network). 1990-е гг.

DSSN позволяет развертывать и поддерживать функционирование группы небольших и недорогих автономных подводных устройств, способных собирать разведывательную информацию и обслуживать подводные лодки.
Входящий в DSSN автономный док, не связанный с кораблем или береговой инфраструктурой и оборудованный собственным источником энергии, скрыт под водой. Он принимает от периодически стыкующихся с ним автономных устройств собранные ими данные (реально объем подобной информации составляет гигабайты) и обеспечивает функции подзарядки и загрузки в устройства новых миссий.
AOSN - автономная сеть поиска в океанах (Autonomous Ocean Sampling Network). 1990-е гг.

Данный проект во многом перекликается с концепцией DSSN. Он подразумевает создание сети быстрых, небольших и дешевых устройств сбора информации, способных нести различную полезную нагрузку, и позволяет подбирать датчики, наиболее точно отвечающие целям конкретной миссии.
В рамках AOSN был разработан недорогой аппарат Odyssey длиной 2 м, способный автономно работать 20 ч независимо от температурных условий, рельефа дна и подводных течений. В бортовой системе Odyssey применяется процессор Motorola 68030.
ATV - дистанционно управляемое устройство (Advanced Tethered Vehicle). 1990-е гг.
В ATV воплотились достижения большинства ранних проектов. Аппарат, оборудованный двумя камерами, сонарами и манипуляторами для захвата объектов, а также кабелем, по которому поступает энергия и происходит обмен данными, способен погружаться на глубины до 7000 м.
В 1998 г. ATV, запущенный с авианосца Yorktown, спустился на дно Тихого океана на глубину около 5000 м.

Для многих подводных устройств типа AUSS характерны проблемы с подводной акустической связью, так как скорость обмена данными при использовании подобных технологий невысока, поэтому ученые разработали специальный оптоволоконный микрокабель FOMC, подходящий для использования в морских условиях.
Кроме того, совершенствуются технологии автоматической передачи собранных данных путем периодической пристыковки к подводному доку, а также создания надежно работающих в воде акустических модемов.
Управление группами роботов: теоретические аспекты
В реально работающих системах управление группами роботов, занимающихся сбором информации или поиском объектов, реализовано не самым лучшим образом. Это связано прежде всего с разнообразием факторов, влияющих на эффективность решения поставленной задачи.
Сегодня такие группы применяются в основном для обнаружения и ликвидации предметов (мин), контроля за проникновением на определенную территорию и фиксации отклонения параметров окружающей среды (температуры, радиации и т. п.) от заданных значений.
Пока оптимальных с математической точки зрения способов управления не найдено, и разработчики, как правило, основываются на качественных оценках. Так, способ решения простой на первый взгляд задачи обнаружения мин в немалой степени зависит от времени, отпущенного на поиск, денежных затрат, связанных с качеством применяемых датчиков, уровня синхронизации действий роботов и т. д.

Практические исследования показали высокую эффективность скоординированных действий автономных устройств, но реализовывать их весьма сложно. В частности, крайне затруднителен процесс отладки системы согласованно работающих машин. Поэтому ученые пока рекомендуют не стремиться к универсальному решению, а настраивать группы роботов на конкретную задачу. Но для этого необходимо сформировать архитектуру дешевой автономной платформы, функциональные возможности которой можно будет легко наращивать подключением датчиков разного качества.
Способы решения стоящих перед роботами задач можно поделить на два класса. Первым предусмотрено использование множества автономных устройств, запрограммированных на простое поведение (например, случайный поиск). К другому классу относятся методы эксплуатации небольшого числа "умных" роботов, оборудованных качественными и дорогими сенсорными элементами и способных целенаправленно искать объекты, эффективно взаимодействуя друг с другом (этот вариант предпочтителен в том случае, если велика вероятность наличия искомого объекта). Однако эффективность каждого решения зависит от многих факторов - стоимости поиска (например, сколько роботов можно потерять в процессе обнаружения мин), главной задачи (требуется ли обнаружить один, несколько или все объекты), качества детекторов, площади, на которой ведутся работы, функции распределения объектов, наличия глобальной стратегии управления всей группой автономных устройств, качества линий связи для общения роботов, способов их взаимодействия и т. д.
Как показали эксперименты, наиболее ресурсозатратны при достижении цели системы, состоящие из множества дешевых устройств, снабженных простыми датчиками. Роботы, использующие средние по качеству датчики, также далеко не всегда добивались успеха даже при скоординированных действиях, хотя они использовали аккумуляторы значительно экономнее. Наибольший эффект дают роботы с дорогими, высококачественными датчиками, особенно при поиске одной цели. Если же в задачу входит выявление множества целей, то оптимальным будет сочетание разных стратегий, настроенных на конкретные условия задачи.
Интересным техническим решением оказался метод повышения качества глобального управления группой роботов, основанный на способности Лисп-интерпретатора динамически выполнять Лисп-инструкции, поступающие в программу в виде данных. Роботы, бортовое ПО которых написано на Лиспе, получали из центра управления не простые команды и рекомендации, а языковые конструкции, обладавшие сложной функциональностью и интерпретировавшиеся на лету, что фактически позволило изменять внутренние стратегии поведения устройств произвольным способом.
Роботы и насекомые
Не снижается интерес военных к созданию миниатюрных автономных устройств, действующих наподобие насекомых, - однако и в этой области проблем гораздо больше, чем реальных достижений. Например, бесполезно пытаться применять для микросамолетов-разведчиков классические законы аэродинамики, рассчитанные на обычные самолеты. Крошечным беспилотным аппаратам для полета нужны крылья типа мушиных, способные делать взмахи со скоростью от 60 до 200 раз в секунду. При этом каждое крыло во время взмаха необходимо очень точно ориентировать, что весьма сложно технологически.
В начале 80-х годов ученые разработали новую модель полета, основанную на принципе неустойчивого равновесия, а в 1992-м немецкий институт биологической кибернетики выполнил детальный анализ процессов, приводящих к возникновению подъемной силы у насекомых. Оказалось, что синхронными движениями основных и дополнительных крыльев они создают вихрь, своеобразный микроторнадо, который и поднимает их в воздух. Однако пока так и не удалось научить роботов правильно работать крыльями, чтобы сформировать этот вихрь. Кроме того, остается неясным, как насекомые переносят грузы в несколько раз тяжелее собственной массы и откуда они берут для этого нужную энергию.
Эти исследования решают и другую задачу - понять, каким образом в больших группах простых созданий осуществляются слаженные коллективные действия. Сегодня создаются биологические модели насекомых, позволившие осознать, например, что муравьи для достижения глобальной цели применяют несложные шаблоны поведения и простейшие методы передачи информации. На основе таких моделей ученые пытаются согласовывать действия роботов, передающих элементарные логические команды путем обмена жестами и световыми сигналами.
На связи!
Организация радиосвязи с (и между) роботами, расположенными внутри зданий, также представляет собой серьезную задачу. Наиболее перспективными видятся всевозможные оптические технологии (оптоволоконные, лазерные, инфракрасные) и мобильная ВЧ-связь. Роботы будут оснащаться передатчиками и ретрансляторами разных типов, а в местах, где связь отсутствует или затруднена, они станут самостоятельно планировать маршруты движения.
Правда, когда общий канал связи используется группой единообразных и легкозаменяемых роботов, возникает задача разделения сообщений: из центра идентифицировать отдельного робота в ряде случаев невозможно. Поэтому предполагается, что в таких группах один главный робот, подключенный к основному каналу связи, будет выбирать "по своему усмотрению" подходящих для решения каждой тактической задачи подчиненных роботов, сообщая им приказ с помощью внутригрупповой связи (в практических экспериментах применялся лазерный канал).
Перспективы
По прогнозам специалистов, в ближайшее десятилетие благодаря развитию ИТ, микроэлектроники, связи, робототехники и массового производства создатели автономных устройств смогут эффективно внедрять общедоступные коммерческие технологии. Становится невыгодным увеличивать функциональные возможности роботов и создавать специализированные аппараты - они получаются дорогими, громоздкими и легко уничтожаются.

В идеале надо разрабатывать единую настраиваемую многоцелевую платформу, способную нести различную полезную нагрузку для сбора информации. Подобный подход исповедует, например, научная лаборатория ВМС США: проектируемые ею подводные автономные устройства снабжены сонарами, которые можно использовать как для связи, так и для поиска мин или обнаружения подводных лодок. Эти устройства основаны на легко обновляемых системной плате, бортовом ПО и современных высокопроизводительных процессорах, быстро обрабатывающих собираемую информацию.
Тормозит развитие подобных роботов и психологическая проблема, характерная для искусственного интеллекта в целом. Из-за качественно разных принципов функционирования реального и виртуального мышления крайне усложнено взаимопонимание между людьми и искусственными созданиями. Если полуразрушенный затонувший корабль человек видит на изображении с первого взгляда, то роботу для его корректного распознавания требуется немало вычислительных ресурсов. И наоборот, робот может быстро обнаруживать в глубинах океанов объекты определенных типов, в то время как оператор нередко ожидает обобщенной картины, подсознательно пропуская важное конкретное сообщение или предупреждение. Выход из такой ситуации - совершенствование ПО, обучение людей и разработка человеко-машинных интерфейсов нового поколения.
Статья опубликована в PC Week/RE #43, 2001 г., стр. 40; #44, стр. 31; #45, стр. 45.
Фотографии публикуются с разрешения Space and Naval Warfare Systems Center, San Diego, http://www.spawar.navy.mil/sandiego.