Работы Проблемной лаборатории ЭВМ ГИФТИ ННГУ в области создания цифровой техники
Эйнгорин М.Я.

ННГУ им. Н.И. Лобачевского и его институт НИФТИ (ранее ГИФТИ) были в числе первых в СССР, создавших в 1954-1957 годы свою оригинальную, последовательную универсальную цифровую вычислительную машину – Машину ГИФТИ с последующим созданием серии спецмашин цифрового управления антенными системами космической связи и управления.
Академик А.А. Андронов, ознакомившись в 1952 году с машинами членкора И.С. Брука (МЭИ), счел необходимым начать работы по созданию цифровых машин в ГГУ. В то время в ГИФТИ велись активные исследовательские работы по устойчивости атомного реактора первого в мире ледокола «Ленин», проектировавшегося опытным конструкторским бюро (ОКБМ) г. Горького. Требовался большой объем вычислений, которые велись группой лаборантов на предельно шумных арифмометрах типа «Мерседес».
Работы по ЭВМ начались с создания лампового макета арифметического устройства (АУ), умножающего числа 7х7. Работы были выполнены студентами 4-го курса кафедры теории колебаний радиофизического факультета ГГУ А.В. Сергиевским и Е.Ф. Сабаевым под руководством старшего преподавателя кафедры Льва Викторовича Родыгина. Макет 7х7, доработанный до 15х15, и сегодня хранится в музее ННГУ. На базе этого макета была оформлена и выполнялась лабораторная работа каждым студентом 4-го курса РФФ кафедры ТК ГГУ.
Создание машины началось с определения ее типа – последовательного, как наиболее экономичного. Память машины на магнитострикционных линиях задержки, замкнутых в кольцо рециркуляции, в 1953 году создавалась студентом 4-го курса А. Тарантовичем под руководством Л. Родыгина. По окончании ГГУ А.С. Тарантович был принят на работу в ГИФТИ для продолжения исследований. Одновременно с 1954 года, также студентом 4-го курса той же кафедры и далее м.н.с. М. Эйнгориным велась разработка АУ (или процессора) последовательной машины. Им же была в 1954 году разработана и опытным производством изготовлена стойка памяти на 1024 32-разрядных слов на магнитострикционных линиях. Позднее было решено изменить направление работ и начать разработку памяти машины на базе магнитного барабана. Это давало большую компактность и меньшую температурную зависимость работоспособности памяти от окружающей среды. Для этого, на первоначальном этапе, был использован магнитный барабан на базе «немецкого» гироскопа от ракеты «ФАУ-2» с закрепленным ротором и вращающимся статором. На статор был «насажен» цилиндр поверхности магнитного барабана. Работы по покрытию магнитного барабана магнитной пленкой, усилителям записи и чтения вел А.С. Тарантович.

Фото 1. Шкафы «Машины ГИФТИ», хорошо видны секции и блоки.
- Тип машины – последовательный.
- Число двоичных разрядов слова – 32/64.
- Число разрядов команды – 32.
- Тактовая частота работы машины – не менее 200 кгц.
- Объем основной памяти на магнитном барабане соответственно 2048/1024 слова.
- Машина должна иметь 32 одно-числовые ячейки по 32/64 разряда «быстрой» памяти.
- Машина комбинированной адресности: трехадресная в отношении «быстрых» ячеек и одноадресная в отношении общей памяти машины – предложение М. Эйнгорина.
- Каждая инструкция (команда) машины должна содержать ячейки «переадресации» в том числе для выполнения групповых операций – предложение А. Гильмана.
- «Быстрые» ячейки включались в общую нумерацию ячеек памяти ее первыми адресами.
- Машина должна иметь ряд положений запятой слов, устанавливаемых для данной задачи.
АУ машины: - Представление отрицательных чисел – в «прямых кодах».
- Процессор должен иметь все стандартные арифметические и логические операции.
- Должен иметь групповые операции со словами от и до заданных адресов.
- Процессор должен выполнять операции умножения и деления при заданных положениях запятой в словах.
- Процессор должен выполнять операции над командами для их модернизации.
- А.У машины должно работать в асинхронном режиме.
Структура машины и конструкции. - Машина должна быть выполнена в виде стоек электроники (АУ, УУ и памяти), отдельно пульта управления и стойки источника питания.
- Пульт управления должен отображать состояния машины и быть удобным для отладки программ и демонстрации работы машины (студентам).
- Блоки и стойки машины должны иметь хороший доступ для контроля и ремонта, возможность осуществления достаточной групповой вентиляции всех электронных блоков.
- Машина должна занимать площадь помещения не более 20 м2.
Элементная база машины. - Лампово-полупроводниковая.
- Машина должна иметь минимальное число типов «стандартных» блоков. Все не стандартные блоки АУ, УУ и ЗУ должны быть сведены в минимальное их число.
- Блоки машины должны содержать минимальное число различных компонентов.
Устройства ввода – вывода машины. - Ввод чисел и команд - с восьмидорожечной телеграфной перфоленты.
- Вывод – рулонный телеграфный аппарат, восьмидорожечная перфолента.
- Преобразования кодов чисел и команд при их вводе – выводе должно осуществляться через арифметические операции в «ждущем» режиме.
Проект машины был принят за основу разработки. Результат проработки проекта и его реализация, с распределение работ по исполнителям, было следующим:
I. Элементная база машины и ее конструкции [1 - 6]: От корректной разработки элементной базы зависит работоспособность, общая стоимость и стоимость эксплуатации машины. Эту часть работы взял на себя автор доклада. В результате был разработан комплекс стандартных блоков, в который входили:
а) Блок инверторов-повторителей с входными элементами 2«ИЛИ» - (4 в блоке) [2],
б) Блок усилителей-повторителей с входными элементами 2«ИЛИ» - (4 в блоке),
в) Динамический триггер (8 в блоке) [4],
г) Блок катодных повторителей с входными элементами 2«ИЛИ» - (8 в блоке),
д) Блок диодных полупроводниковых дешифраторов 3 → 8 (2 в блоке).
е) Все одно-числовые регистры АУ и регистры «быстрой» памяти были выполнены ре-циркуляционными на магнитном барабане с коммутацией на 32/64 разряда [1].
Для всех «ламповых» блоков был выбран единый двойной триод 6Н1П. Все «логические» элементы, дешифраторы и ограничители переходных процессов были выполнены на п/п диодах. Статические триггеры собирались на базе инверторов блока а) согласно работы [2]. Для всех сигналов машины был принят единый нулевой уровень отсчета. В результате автором была составлена инструкция для разработчиков секций и стоек машины, «нагрузочные» свойства элементов каждого из блоков а) – д) с начертанием их в виде матричных структур. Конструкция стандартного блока видна на Фото 1. машины.
Три стойки представляли собой шкафы, закрытые стеклянными дверьми с тремя внутренними секциями, каждая по 5 х 6 стандартных блоков. Все «не стандартные» элементы каждой из стоек собирались в один «не стандартный» блок стойки. Фактически в 1954–1955 годы по своей элементной базе была создана лампово-полупроводниковая машина.
II. Пульт управления: (разработчик М. Эйнгорин) – горизонтальный стол с наклонной панелью и кнопками управления машиной, далее с продолжением в виде вертикальной панели со световыми малогабаритными неоновыми индикаторами состояния машины. По центру наклонной части была расположена электронно-лучевая трубка (ЭЛТ) отображения содержимого динамических регистров АУ, регистров «быстрой» и общей памяти машины. Возможно, это было первое применение ЭЛТ для ЭВМ в мире, в СССР – точно [6]. Для наклонной панели были разработаны специальные многопозиционные переключатели – коммутаторы оригинальной конструкции.
Высоковольтное питание, цифровые строчную и кадровую «развертку» трубки, по «жесткому» заданию принципов синхронизации М. Эйнгорина выполнил Г.А. Денисов.
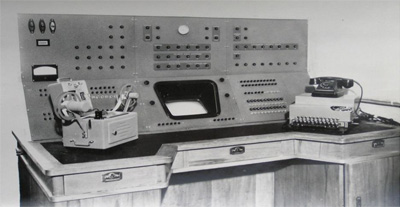
Фото 2. Пульт управления машины.
(руководитель А. Тарантович, исполнитель инженер А. Гончаров). В объем разработки входило: покрытие поверхности «малого» и «большого» МБ магнитной пленкой, разработка усилителей - формирователей записи и чтения, прибор записи тактовых импульсов на поверхность МБ, участие в испытаниях вариантов магнитных головок. Разработка монтажных схем блоков и панелей стойки памяти, согласование, по переходным процессам, стойки памяти и МБ. Разработка блока крепления магнитных головок и блока головок 32/64 взял на себя А. Тарантович, фото 1, дальняя стойка. Машина имела 32 «быстрых», одно-числовых ре-циркуляционных регистра ускорения работы. Реализовать 32 «быстрых» ре-циркуляционных регистра и регистры АУ на магнитном барабане предложил М. Эйнгорин, что резко сократило аппаратый объем машины и расширило ее возможности за счет большого числа одно-числовых «быстрых» ячеек памяти [1, 6]. Сам магнитный барабан, по заданию А. Тарантовича, был изготовлен в ОКБМ.
Разработку магнитной головки и оснастки для ее производства взял на себя автор доклада, исполнитель – механик высшей квалификации В.В. Веселовский (участник ВОВ). Она представляла собой непосредственно магнитную головку размером 0,3 мм совмещенную с импульсным трансформатором 2 мм диаметром. Возможно это была самая миниатюрная магнитная головка, разработанная, изготавливаемая и использовавшаяся в СССР того времени. Магнитная головка с «массивной» латунной оправой представлена на Фото 3. Коммутация магнитных головок, по предложению автора настоящей статьи, осуществлялась двумя точечными, германиевыми п/п диодами по симметричной схеме [6].
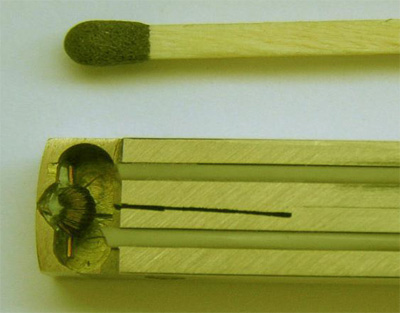
Фото 3. Магнитная головка в сравнении с «головкой» стандартной спички.
1. АУ машины выполняло все арифметические, логические операции, операции преобразования кодов ввода – вывода, групповые операции и ряд специальных операций.
2. В связи с одноадресным и трехадресным кодированием команд в АУ были введены спецоперации «переброски» слов из общей памяти машины в «быструю» и наоборот.
3. Представление отрицательных чисел слов - в «прямых кодах».
4. АУ машины коммутировалось своей работой с 32/64 разрядными словами.
5. АУ машины имело ряд положений запятых слов при 32/64 разрядной работе.
6. АУ машины имело возможность работы с командами машины для модернизации адресов.
7. Регистры АУ были выполнены на базе одно-числовых ре-циркуляционных регистров на базе магнитного барабана с цепочками из оригинальных динамических триггеров [1, 4, 6], обеспечивающих необходимые сдвиги кодов слов при выполнении, как самих операций, так и в режиме сокращения времени их выполнения.
8. Особенностью АУ машины было введение в него 4-го управляющего, ре-циркуляционного регистра, определяющего особенности выполнения операций целой и дробной частей слов, общее время выполнения операций. Для каждой операции в него вводился код из ДЗУ АУ [1].
9. АУ машины содержало диодное полупроводниковое ЗУ управляющих кодов каждой из 64-х операций машины [1, 3].
10. АУ машины, для ускорения, работало в асинхронном режиме.
11. Размещалось в одной стойке машины, смотри фото 1.
V. Устройство управления машиной: (руководитель А. Гильман, исполнители Н. Жеглова и Р. Садеков, позднее к.т.н.). В задачу исполнителей группы входила разработка принципиальных и монтажных схем на базе стандартных и одного не стандартного блока машины. Особенности системы управления:
1. Машина, в случае использования одно-числовых регистров, работала как трехадресная, при использовании только основной памяти, как одноадресная [3, 6].
2. В адресную часть каждой инструкции были включены ячейки переадресация, предложенные А. Гильманом, для сокращения числа инструкций программ. Этим были «заняты» все ячейки инструкций, не давшие впоследствии расширить памяти машины.
3. Генератор синхроимпульсов, обеспечивающий необходимую синхронизацию процессов управления всей машины, был собран в виде плоской матрицы на основе замкнутых цепочек из динамических триггеров I. в) на основе работ [4, 5].
4. Отдельные регистры выбранных адресов команд были выполнены на статических триггерах, собранных на основе принципа I. а).
Устройство управления со статическими регистрами и «переадресацией», синхрогенератором и коммутацией 32/64 разместились на 3-х панелях второй стойки машины.
VI. Ввод – вывод информации машины. На первом этапе создания машины в качестве устройства ввода – вывода информации был использован стандартный рулонный телеграфный аппарат с приборами ввода – вывода на 8-ми дорожечной телеграфной ленте. При последующих доработках машины спектр вводных и выводных устройств был расширен, в том числе на основе перфокарт. Этой частью работ занимался М. Брейдо.
VII. Стойка питания и вентиляции машины. Стойка питания по результатам разработки элементной базы машины и объему ее блоков, выданные автором настоящей работы, была разработана В.И. Королевым (позднее кф-мн). Все выпрямительные сборки были выполнены на «трофейных» селеновых столбах. Вентиляция, по тем же исходным данным, была рассчитана Е. Сабаевым и А. Сергиевским.
VIII. Кадры, разработчики, патентование, другое: Все основные разработчики - выпускники кафедры ТК РФ ННГУ. Л.В. Родыгин – выпускник кафедры, его дипломником был А. Тарантович, Эйнгорин – дипломник А. Гильмана. М. Брейдо и Г. Зарницин – дипломники М. Энгорина, Н. Жегорва и Р. Садеков – дипломники А. Гильмана. Дипломная работа А. Гончарова и, соответственно, его руководитель обнаружены не были. Для работы по «Машине ГИФТИ» из ГРТТ были взяты 3-и техника: А. Аралов, Л. Маркин и Т. Рожков. Учет и организацию контроля всех блоков машины вела З.С. Кечиева. Большую помощь в разработке оказывали директор ГИФТИ Я.Н. Николаев, главный инженер Б.А. Павельев и директор опытного производства – Г.В. Марчев.
Конструкторские работы обеспечивала О.В. Рукавишникова.
Я специально упоминаю разработчиков и исполнителей этой уникальной для своего времени разработки, ибо большинства из них, на сегодня, уже нет. Светлая им память.
«Машина ГИФТИ» стала одним из решающих факторов в создании одного из кибернетических направлений развития ННГУ. Машина состоялась только благодаря предельно продуманной элементной базе, принципам организации выполнения ее операций и конструкций. Без этих решений, как сама машина, так и многое последующее могло не состояться. Многие научно-технические решения по «Машине ГИФТИ» могли составить предмет изобретения, но этого не случилось в связи с малой компетенцией руководства в этом вопросе.
IX. Завершение работы над машиной. Всем создателям «Машины ГИФТИ» в 1958 году была объявлена благодарность (запись в трудовых книжках), выданы, значительные по тем временам, премии. «МашинаГИФТИ» была принята в эксплуатацию на базе программы созданной З. Баталовой.
Х. Образование в области ЭВМ и программирования. На следующий год после окончания университета в 1955 году меня пригласили читать курс лекций по цифровым ЭВМ на физико-математическом факультете ННГУ (ГГУ). В первом потоке1955 года были: В. Гольдберг, Г. Жислин …; далее курс 1956 года: А.А. Мареов …; далее курс 1957 года Ю. Первин, Ю. Кетков, …; и далее до 1959 года. С 1960 года продолжил читать лекции на первом в СССР факультете ВМК. В то время, аналогичные лекции мной читались на физико-математическом факультете ГПИ, «Университете повышения квалификации инженерных кадров» региона.
XI. «Машина ГИФТИ» в работе. Первыми программистами на созданной машине были: З. Баталова, В. Корнилова и Ю. Кетков (позднее д.ф.-м.н.). Ими же были созданы первые стандартные программы и программы контроля функционирования машины. На машине было решено значительное число научно – технических задач по устойчивости ЯР, кристаллографии, экономических и технологических задач. Главное, был подготовлен широкий круг студентов и специалистов для решения задач на цифровых ЭВМ.
ХII. ВЦ и ПЛ ЭВМ ГИФТИ при ГГУ (ННГУ). На основе успешной разработки и пуска машины в эксплуатацию приказами Минвуза СССР в 1958 году в ГГУ были созданы: Вычислительный центр, в который была включена созданная машина, ряд аналоговых машин и создана Проблемная лаборатория ЭВМ (ПЛ ЭВМ ГИФТИ при ГГУ). С 1958 года я вошел в эту лабораторию, с 1964 года ее возглавил.
XIII. Специализированные машины разработки ПЛ ЭВМ. Технический прогресс, наука и активно развивающиеся космические работы в СССР ставили много новых научно-технических задач. Одной из таких задач в 1959 году было исследование отражения радиоволн от «облака» иголок, запущенных ракетой Великобритании по совместной с НИРФИ программе «Джорднл-Бэнк». В рамках программы на полигоне НИРФИ «Зименки» было решено построить три 15-ти метровых радиотелескопа. Им было необходимо точное управление. Один из руководителей НИРФИ М.М. Кобрин обратился ко мне. Просчеты показали, что универсальные цифровые машины того времени с задачей не справятся, ибо необходимо быстродействие не менее 20 млн. операций в секунду. На тот момент быстродействие составляло не более 1 млн. оп/сек. Решения были найдены на основе регистров, линейных интерполяторов, цифровых датчиков обратной связи и преобразователей код-аналог для управления аналоговыми силовыми приводами телескопов. Одновременно фактически был изобретен цифровой бесконечного усиления принцип управления, за счет которого точность работы цифровой – аналоговой системы был повышен до одного цифрового дискретного шага (10 угловых секунд) системы управления.
Для реализации цифровой системы управления комплекс логических элементов «Машины ГИФТИ» был переработан на полупроводниковую основу. В результате тот же блок 4-х инверторов выглядел, как это показано на фото 4. Функциональная сборка новой системы из 20 блоков показана на фото 5. Вся система управления СПУ–1 была размещена в двух тумбах стола, на верхней части которого были собраны все органы управления и отображения функционирования системы, смотри фото 7 в его правой нижней части.
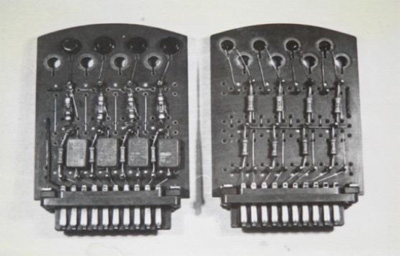
Фото 4. Блоки ЦСУ
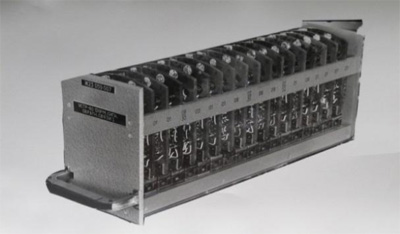
Фото 5. Функциональный блок системы.

Фото 6. Один из радиотелескопов.
Фото 7. Работа на системе СПУ – 1 на полигоне.
После успешных работ над системой СПУ-1 на полигоне «Зименки» к нам обратились представители московского «НИИП» (приборостроения) имени академика .. .. Рязанского с предложением разработать цифровую систему управления для строящейся антенной системы ТНА-400 с 25-ти метровым диаметром зеркала на крымском полигоне под г. Симферополем. Работа шла под шифром МВ (Марс - Венера). Начав работу с новым заказчиком, мы встретились с новыми, достаточно «жесткими» требованиями к функционированию нашей системы: надежность, широкий спектр рабочих температур, работоспособность системы при отключении питания. Возникла необходимость введения нелинейной интерполяции, введение «ветровых» и «температурных» коррекций при слежении, нелинейных поправок по углу места в связи с рефракцией атмосферы. Точность работы системы была повышена до ± 5`` угловых секунд. Дополнительно формировались цифро-аналоговые сигналы скорости. Ленты вводной информации и результатов управления, для возможности сличения, должны были быть идентичны. Система должна иметь «горячий» резерв, блок анализа и коммутатор, для быстрого перехода с одной системы управления на «резервную». После анализа параметров разработки стало очевидным, что необходима разработка фактически новой системы. Было также очевидным, что никакая цифровая ЭВМ того времени, в реальном масштабе времени, справится с подобной задачей не сможет, а принятый принцип специализированной машины на регистрах и, уже нелинейных интерполяторах, может обеспечить выполнение подобной разработки. Задание было согласовано к сентябрю 1960 года, а к середине 1962 года полный двойной комплект СПУ-2 (разработанный, изготовленный и отлаженный сотрудниками ПЛ ЭВМ) был установлен на полигоне под г. Симферополем.
Разработчики системы СПУ-2: О. Герасимов, А. Преображенский, И. Еремина, Н. Репников, Л. Яснева, другие сотрудники ПЛ ЭВМ, Главный конструктор – М. Эйнгорин. Система, в виде двух полукомплектов коммутатора, стоек питания и регистрации, коммутатора полукомплектов представлена на фото 9. На фото 8 показана антенная система ТНА – 400, к сожалению, сфотографированная после ее фактического разорения при управлении Крымом «не залежной» Украиной (1991 – 2014 годы). Тому же полному разорению подверглась аппаратура и помещение фото 9, аппаратура других помещений.

Фото 8. Антенная система ТНА – 400 с диаметром зеркала 25 метров на крымском полигоне под городом Симферополь.

Фото 9. Два комплекта СПУ – 2, установленные на космическом пункте г. Симферополя.
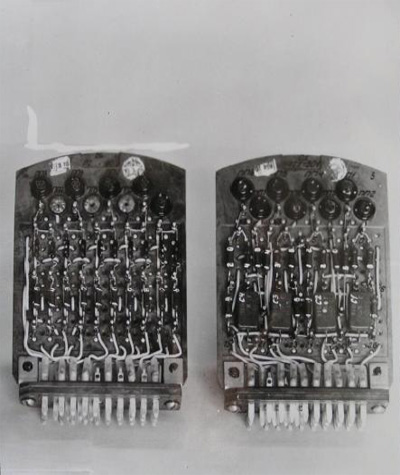
Фото 10. Блок СПУ–2

Фото 11. Прибор контроля блоков СПУ – 2.

Фото 12. Антенная система АДУ - 1000.
В связи с расширившимся воспроизводством в СССР интегральных микросхем «заказчиком» была выдвинута просьба: перевести разработки ПЛ ЭВМ по СПУ на стандартные микросхемы, в основном, серии 133 и конструктивы «заказчика». ПЛ ЭВМ и я, как Главный конструктор систем, приняли эту просьбу. При этом, с «заказчиком» было согласовано расширение самого задания на СПУ. Так, например, система должна иметь три управляемых координаты для «работы» с антенными системами с «наклоняемой» вертикальной осью. В этом случае азимутальная «переброска» луча антенны происходит на меньших скоростях, чем это было бы при двух координатном построении антенны и ее управления. Режим был необходим при прохождении объектом слежения зенита. Система СПУ-4 была разработана, изготовлена и испытана, далее была отправлена на полигон.
Общий вид системы представлен на фото 13: система имела значительные габариты, представляющие собой две стойки и пульт управления. Основные участники разработки системы СПУ-4: В. Быков, В. Горбачев, А. Преображенский, А. Тарантович, Л. Яснева, другие.
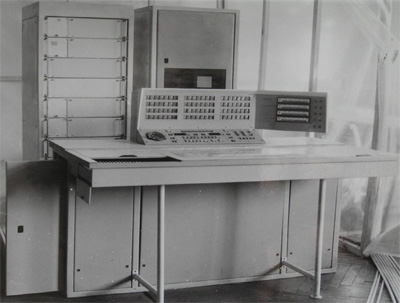
Фото 13. Общий вид системы СПУ-4, на серийных микросхемах и конструктивах «Заказчика».
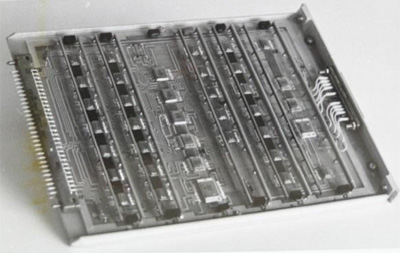
Фото 14. Одна из плат системы СПУ - 5.
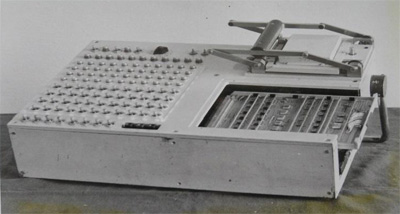
Фото 15. Прибор контроля плат плат СПУ-5.
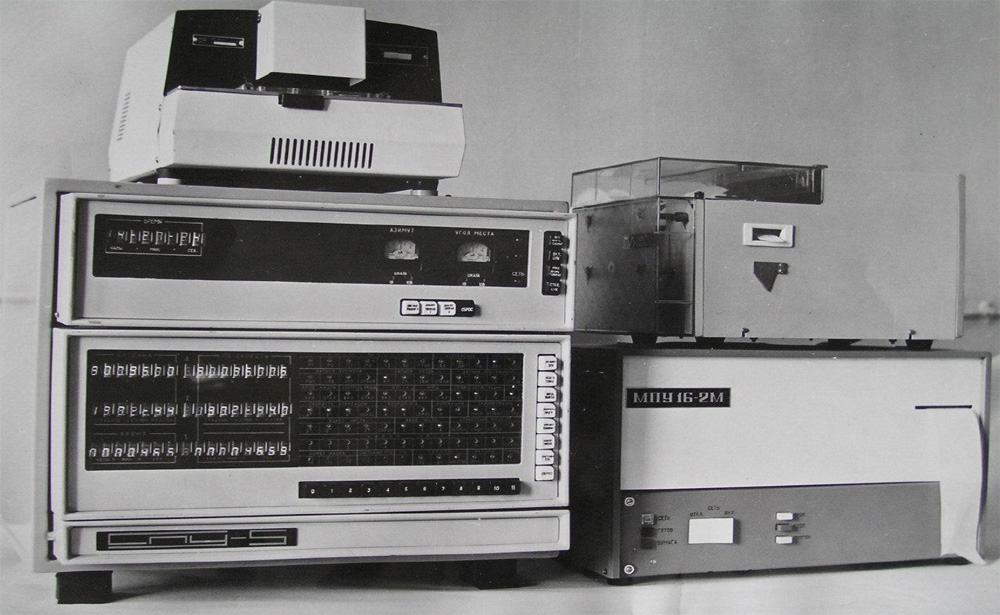
Фото 16. Трех-координатная система управления СПУ - 5.
Основные участники разработчики системы СПУ-5: Н. Макаров – зам. главного конструктора, Н. Рындовская, О. Колотилкины, В. Чевачина, И. Хайсман, В. Королев, Н. Репников, А. Тарантович, В. Гоносков, Н. Жеглова, Г. Луннова, Л. Булюкина, другие, М. Эйнгорин – Главный конструктор.

Фото 17. Преобразователь сигналов СКВТ – цифра, на две координатны СПУ - 5.
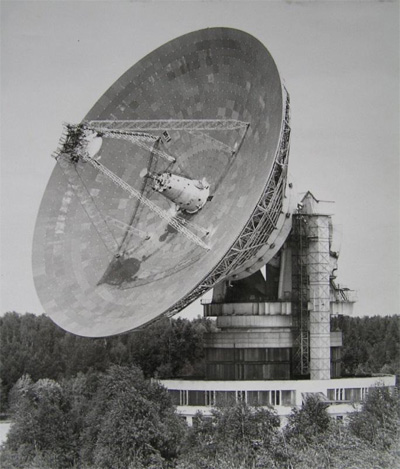
Фото 18. Антенная система ТНА - 1500, диаметр зеркала 69 метров.
Цифровые системы на регистровых структурах и интерполяторах были построены как спецмашины, ибо их эквивалентная компьютерная скорость составляла не менее 20 млн. операций в секунду, на то время 1959 - 1990 годы подобных машин еще не существовало.
Все системы разработки от СПУ-1 до СПУ-5 были созданы, на основе изобретений, принадлежащих ПЛ ЭВМ, так, что в цепи с аналоговыми приводами, обеспечивали практически бесконечный коэффициент усиления. Это, в свою очередь, обеспечило высочайшую точность работы систем в ± 5`` минимального углового шага. При этом, каждая из систем СПУ 1 – 5 имела широкий спектр временных интервалов вводимых данных и «свой» оригинальный, на базе АС, принцип нелинейной без процессорной интерполяции данных и комбинаций их объединения.
Необходимым отметить, что разработки, в которых я принимал участие как главный конструктор, цифровые системы управления большими антенными комплексами космических пунктов СССР, разработанные в период с 1959–1990 гг., работают и сегодня. Они построены на глубоко продуманной элементной базе и на основе оригинальных принципов построения цифровых систем управления. В связи с развитием робототехники, сегодня мой интерес переключился на исследование элементной базы живых систем [9], в том числе и их памяти.
XIII. Микромашина на регистровых структурах. Если вспоминать о прошлом, то не могу не сказать начатую мной в 1961 году разработку аналога «Машины ГИФТИ» на основе динамических регистровых структур [4]. В то же время в ПЛ ЭВМ успешно работала память на основе 32-х тонкопленочных магнитных дисков, плавающих над 32 полированными поверхностями и плавающих магнитных головках, без оправок, фото 3. Для минимашины были разработаны блоки на 4 транзистора, секции, каждая на 20 блоков и каркас блока машины на 5-ть секций. Объем конструкции «электроники» машины был (12 х 16 х 20) см. Мной были разработаны все схемы машины, в ЭМ ГИФТИ изготовлен каркас, секции и блоки машины, фото 19. Работы пришлось прекратить в связи с огромной загруженностью по системе СПУ-2, отсутствием финансирования разработки. Если бы микромашину возможно было «довести» до реализации, то она стала бы самой малой машиной в мире того времени. Жаль, что СССР не оказался первым разработчиком ПК.
![Каркасы малой ЭВМ на динамических регистрах структурах по [4]](/images/sorucom_2017/sorucom2017_57_19.jpg)
Фото 19. Каркасы малой ЭВМ на динамических регистрах структурах по [4].
Цифровой групповой кардиомонитор сердечной деятельности
Еще одна разработка ПЛ ЭВМ, она касается медицинской техники. Это кардиомонитор для обеспечения контроля за 5-ю больными. Разработчик Н.Д. Репников. При ЧП с сердцем, система вызывала медперсонал к указанному больному. Систему в производство, к сожалению, внедрить не удалось, это 1964 год. В московском институте, куда мы обратились, к производству и использованию были свои – ламповые разработки в рост человека.
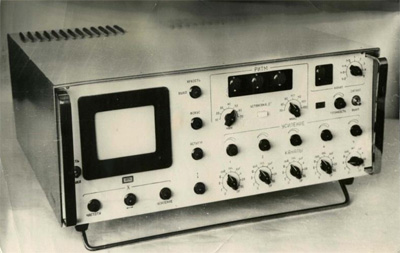
Фото 20. Цифровой, полупроводниковый кардиомонитор палат больниц «интенсивной» терапии.
На рубежах 60-80-х годов прошлого столетия для создания цифровых систем управления 2-х - 3-х координатными объектами с достаточно высокими техническими характеристиками нам потребовались системы управления, выполненные не на процессорных структурах, а на принципах, как это было реализовано на базе СПУ. Сегодня скорость работы одиночных вычислительных средств существенно превысила 20 мега операций в секунду. Оснастив их преобразователями для "стыковки" с объектами управления мы относительно легко решаем задачи управления. При необходимости, можем использовать многопроцессорные системы, активно разрабатываемые и внедряемые сегодня. Но это временное решение, ибо для управления существенно более сложными живыми объектами природа не использует системы с процессорами, работа которых основана на арифметических операциях, программах и инструкциях управления. Поэтому будущие системы управления, предназначенные для постоянно усложняющихся объектов, очевидно, будут основаны на иных принципах, чем современные компьютеры и многопроцессорные системы. Природа использует оптимальные решения задач управления, чем сегодня использует человек. Мозг человека и других живых существ сегодня решает существенно более сложные, при своих меньших объемах, задачи, быстрее и имеют более высокую надежность при полном отсутствии (!) процессорных систем.
Задача будущего, понять структуры мозга, математические основы его построения и осуществить реализацию аналога мозга доступными человеку средствами. На сегодня же можно сказать, что решения на базе регистровых структур и интерполяторах были более перспективными, чем даже на основе современных программных вычислительных систем. Многопроцессорные системы - это один из тупиковых направлений развития и управления сложными объектами, хотя на сегодня, снимающими проблему точного управления. Мы имели печальный опыт создания предельно громоздкой единой цифровой системы управления одним из московских автозаводов на базе единого вычислителя. Работа не дала необходимых результатов. Научно-техническую историю и события следует помнить, анализировать и делать выводы, чтобы идти и развиваться дальше с меньшим числом глобальных ошибок.
Литература.
-
Эйнгорин М.Я., «Об одном арифметическом устройстве последовательной электронно-вычислительной машины». Труды конференции «Пути развития советского математического машиностроения и приборостроения», 12 - 17 марта 1956 года, том 1, стр. 92-102, г. Москва.
-
Эйнгорин М.Я., «О системах уравнений алгебры логики и синтезе дискретных управляющих схем с обратными связями», Известия высших учебных заведений, ж. «Радиофизика», т. I, № 2, 1958 год.
-
Эйнгорин М.Я., «О некоторых операциях реализуемых вычислительной машиной последовательного действия», Известия высших учебных заведений, ж. «Радиофизика», т. V, № 2, 1962 год
-
Эйнгорин М.Я., «Динамические задержки, регистры и триггеры без сдвига информации», Известия высших учебных заведений, ж. «Радиофизика», т. V, № 5, 1962 год.
-
Эйнгорин М.Я. «Теория ре-циркуляционных запоминающих устройств и генераторов», Известия Вузов , ж. «Радиофизика», т. VI? № 5, 1964 год.
-
Эйнгорин М.Я «Как создавалась первая цифровая последовательная ЭВМ в ССР - Машина ГИФТИ», монография, Федеральное агентство по образованию, Нижегородский государственный университет им. Н.И. Лобачевского, Нижний Новгород, Издательство Нижегородского госуниверситета, 2007 год, ISBN 978-5-91326-015-4.
-
Эйнгорин М.Я. Презентация систем цифрового управления (СПУ) большими антенными комплексами космической связи и управления: http://kik-sssr.ru/dounload/sistemy_upr.afu.pdf
-
Эйнгорин М.Я., Н. Макаров, другие. Изобретения и соответствующие А.С СССР № 282425, 409260, 951336, 1012437, 1034977, 1049557, 1164068, 1331310, 1220900, 1257819, 1305412, 1640827, 1691519 … всего более 50.
-
Эйнгорин М.Я. «Основы синтеза структур нуклеотидов, грамматик и генов живых систем», С. 174, ISBN 987-5-9904043-2-8, г. Нижний Новгород, 1917 год.
Об авторе: Нижегородский (Горьковский) государственный исследовательский университет им. Н.И. Лобачевского,
Нижний Новгород
Материалы международной конференции Sorucom 2017
Помещена в музей с разрешения автора
18 января 2019